Метка «система»
− Таблица 6.1



 32
32 − 6.2.3. Определение вида и параметров корректирующих устройств
А. Наиболее просто определяется корректирующее устройство последовательного типа.
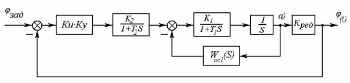
Задана передаточная функция разомкнутой цепи системы без коррекции Задана структурная схема следящей системы (рис. 6.8): Рис. 6.8 На схеме: Ки - крутизна измерительного элемента, Ки = 0,5 в/град; Ку - коэффициент усиления электронного усилителя, Ку = 30 мА/в; К2 , Т2 - коэффициент Проблема обеспечения требуемых свойств линейных САУ является сложной. В ней могут быть выделены следующие основные задачи: · обеспечение устойчивости (стабилизация); · повышение точности регулирования в установившихся режимах (уменьшение или устранение статической ошибки воспроизведения задающего воздействия, уменьшение или устранение влияния постоянных возмущений); Их удобно применять при использовании сложных законов управления, когда наряду с основным сигналом (ошибкой-ε) вводятся его производные или интегралы. Введение производных служит стабилизирующим средством, увеличивается запас устойчивости (добавляется положительная фаза, вследствие чего радиус-векторы АФЧХ поворачиваются против часовой стрелки). Производная может осуществляться не . Введем последовательное корректирующее устройство
. Введем последовательное корректирующее устройство . Если желаемая передаточная функция разомкнутой системы -
. Если желаемая передаточная функция разомкнутой системы - читать далее »
− 6.2.4. Пример синтеза корректирующего звена в цепи обратной связи
читать далее »− 7. Способы и средства улучшения динамических свойств линейных САУ. Корректирующие устройства. Инвариантность
читать далее »− 7.2. Последовательно-параллельные корректирующие звенья
читать далее »