Метка «время»
− 6.2.4. Пример синтеза корректирующего звена в цепи обратной связи
Задана структурная схема следящей системы (рис. 6.8):
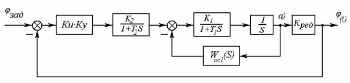
Рис. 6.8
На схеме:
Ки - крутизна измерительного элемента, Ки = 0,5 в/град;
Ку - коэффициент усиления электронного усилителя, Ку = 30 мА/в;
К2 , Т2 - коэффициент
читать далее »
− 7. Способы и средства улучшения динамических свойств линейных САУ. Корректирующие устройства. Инвариантность
Проблема обеспечения требуемых свойств линейных САУ является сложной. В ней могут быть выделены следующие основные задачи:
· обеспечение устойчивости (стабилизация);
· повышение точности регулирования в установившихся режимах (уменьшение или устранение статической ошибки воспроизведения задающего воздействия, уменьшение или устранение влияния постоянных возмущений);
читать далее »
− 7.1. Последовательные корректирующие устройства
Могут составляться из различных по своей физической природе элементов – электрических, механических, гидравлических и т.д. Широкое распространение в САУ нашли звенья, составленные из электрических R-, L-, C- элементов. Если эти звенья не содержат источников электродвижущих сил, их называют пассивными. Пассивные последовательные корректирующие устройства могут быть представлены в виде
читать далее »
− 7.2. Последовательно-параллельные корректирующие звенья
Их удобно применять при использовании сложных законов управления, когда наряду с основным сигналом (ошибкой-ε) вводятся его производные или интегралы. Введение производных служит стабилизирующим средством, увеличивается запас устойчивости (добавляется положительная фаза, вследствие чего радиус-векторы АФЧХ поворачиваются против часовой стрелки). Производная может осуществляться не
читать далее »
− 7.3. корректирующие устройства в виде обратных связей
Выше уже отмечалось, что обратные связи могут быть положительными и отрицательными. Кроме того, обратные связи могут быть жесткими и гибкими:
a) жесткая обратная связь Wос(S)=Kос;
b) инерционная жесткая обратная связь Wос(S)= ;
;
c) гибкая обратная связь Wос(S)
читать далее »