6.1. Виды корректирующих устройств
Различают следующие основные виды корректирующих устройств.
1. Последовательное корректирующее устройство:
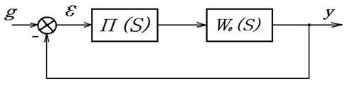
Рис. 6.1
В этом случае передаточная функция разомкнутой цепи системы:
 |
(6.1) |
2. Корректирующее устройство параллельного типа:
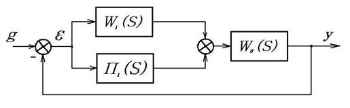
Рис. 6.2
Передаточная функция разомкнутой цепи системы:
 |
(6.2) |
где  передаточная функция части цепи регулирования.
передаточная функция части цепи регулирования.
3. Корректирующее устройство, выполненное в виде местной обратной связи:
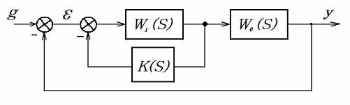
Рис. 6.3.
Передаточная функция разомкнутой цепи системы в этом случае:
 |
(6.3) |
В качестве корректирующих устройств обычно применяют отрицательные обратные связи.
4. Корректирующие устройства по внешнему воздействию.
Внешние воздействия делятся на задающие, сигнал которых система должна воспроизводить, и возмущающие, действия которых нужно нейтрализовать.
5. Неединичная главная обратная связь.
При таком способе, как следует из передаточной функции замкнутой системы, существенно меняется ее характеристическое уравнение, и поэтому нужно следить, чтобы получалось желаемое качество переходного процесса.
Использование того или иного вида корректирующих устройств определяется удобством технического осуществления. В линейных САУ одинаковые динамические свойства могут быть обеспечены разными видами корректирующих устройств.
Для получения формул перехода необходимо приравнять результирующие передаточные функции (6.1) – (6.3):
 |
(6.4) |