Метка «система»
− 5.3. Показатель колебательности М
Рис.5.8
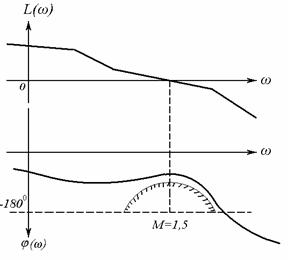
Рис.5.9
Рис.
Удобство показателя колебательности определяется тем, что запас устойчивости характеризуется одним числом, имеющим для сравнительно широкого класса систем регулирования сравнительно узкие пределы (M=1,1÷1,5).
Для оценки быстродействия по АЧХ замкнут
читать далее »
− 5.4. Точность систем автоматического управления. Коэффициенты ошибок
Одним из основных требований, предъявляемых к САУ является точность воспроизведения задающего воздействия, которая определяется формой установившегося процесса управления (увын.(t)). При этом установившаяся ошибка системы будет
 , (5.7)
, (5.7)
а полное значение ошибки, существенное для начала процесса, равно<
читать далее »
− 6.1. Виды корректирующих устройств
Различают следующие основные виды корректирующих устройств.
1. Последовательное корректирующее устройство:
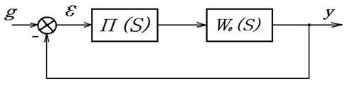
Рис. 6.1
В этом случае передаточная функция разомкнутой цепи системы:
 |
(6.1) |
читать далее »
− 6.2. Частотный метод синтеза корректирующих устройств
Свойства САР полностью определяются частотными характеристиками ее разомкнутой цепи. Если все элементы системы минимально-фазовые, то достаточно рассматривать только АЧХ. Наиболее приемлемы для целей синтеза асимптотические ЛАЧХ, для их построения почти не требуется расчетов. Процесс синтеза включает в себя следующие операции:
1. Построение асимптотической ЛАЧХ неизм
читать далее »
− 6.2.1. Построение низкочастотной части желаемой ЛАЧХ
а. Пусть заданы «рабочие» частота  и амплитуда
и амплитуда  задающего воздействия
задающего воздействия  , имеющие место при работе данной системы; задана так же допустимая амплитуда ошибки
, имеющие место при работе данной системы; задана так же допустимая амплитуда ошибки  . В пересчете на эквивалентный синусоидальный сигнал за
. В пересчете на эквивалентный синусоидальный сигнал за
читать далее »