Метка «параметры»
− 6.2.3. Определение вида и параметров корректирующих устройств
А. Наиболее просто определяется корректирующее устройство последовательного типа.
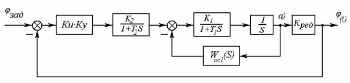
Задана передаточная функция разомкнутой цепи системы без коррекции Задана структурная схема следящей системы (рис. 6.8): Рис. 6.8 На схеме: Ки - крутизна измерительного элемента, Ки = 0,5 в/град; Ку - коэффициент усиления электронного усилителя, Ку = 30 мА/в; К2 , Т2 - коэффициент Проблема обеспечения требуемых свойств линейных САУ является сложной. В ней могут быть выделены следующие основные задачи: · обеспечение устойчивости (стабилизация); · повышение точности регулирования в установившихся режимах (уменьшение или устранение статической ошибки воспроизведения задающего воздействия, уменьшение или устранение влияния постоянных возмущений); Могут составляться из различных по своей физической природе элементов – электрических, механических, гидравлических и т.д. Широкое распространение в САУ нашли звенья, составленные из электрических R-, L-, C- элементов. Если эти звенья не содержат источников электродвижущих сил, их называют пассивными. Пассивные последовательные корректирующие устройства могут быть представлены в виде Максимуму АЧХ соответствует частота ( ЛАЧХ строится по уравнениям двух асимптот: . Введем последовательное корректирующее устройство
. Введем последовательное корректирующее устройство . Если желаемая передаточная функция разомкнутой системы -
. Если желаемая передаточная функция разомкнутой системы - читать далее »
− 6.2.4. Пример синтеза корректирующего звена в цепи обратной связи
читать далее »− 7. Способы и средства улучшения динамических свойств линейных САУ. Корректирующие устройства. Инвариантность
читать далее »− 7.1. Последовательные корректирующие устройства
читать далее »− 3.2. Высота пика тем больше, чем меньше коэффициент демпфирования
 .
. ,
, определяется из выражения
определяется из выражения  ).
).
читать далее »